









数字图像处理:边缘检测
序言
在之前的文章中,我介绍了傅里叶变换,这次我将介绍另一种图像处理方法,边缘检测。在openCV中,有很多函数可以让我们找到图像的边缘,在这篇文章中,我将挑选出比较有代表性的Sobal算子和Laplacian算子进行介绍。
边缘检测
既然我们要检测边缘,首先我们需要了解边缘是什么。
最简单的边缘
以上图为例,我们可以看到黑白的分界线就是我们要找的边缘,也就是像素之间的急剧变化。
拉普拉斯算子
原则拉普拉斯算子使用对图像进行微分的方法来提取边缘。具体推导方法如下。
以与正面相似的图片为例,取其中一条横线,加以区分。
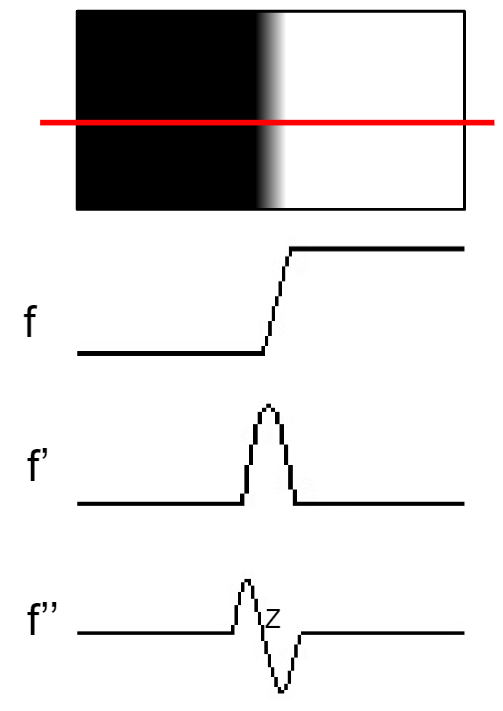
可以看出,在边缘的交界处,经过微分后,会出现一个明显的峰值。我们可以设置一个阈值,这样如果微分后的图像超过这个阈值,就会判断为边缘,进行后续处理。
但是这种方法不够严谨,所以也可以对图像进行两次微分。而二阶导数结果中的Z点,也就是“过零”,就是我们要找的边。
在了解了基本原理之后,我们需要从数学上推导出 Laplacian 所需的掩码应该是什么样子。从上面的介绍可以看出,最重要的部分就是对图像进行区分,但其实这在图像中并不难,只要从下一个网格的像素中减去上一个网格的像素,即可以得到斜率,它是一阶导数。

数学表达式
在知道如何推导一阶微分之后,同样可以推导出二阶微分。在这里,我们将跳过推导过程,直接查看结果。

二阶微分的数学公式
至此,我们得到了我们需要的拉普拉斯掩码。
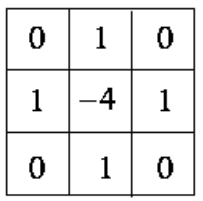
拉普拉斯算子掩码
实施
我们可以使用 openCV 中提供的拉普拉斯运算函数:
dst = cv2.Laplacian(src, ddepth, ksize)
src :要处理的图像。
dst :输出图像。
ddepth :图像的深度。有许多标志可以使用。最常用的是cv2.CV_8U和cv2.CV_16S。
ksize :掩码的大小。
import cv2
def main():
# read image
gray_img = cv2.imread("./lenna.jpg", 0)
cv2.imshow("img",gray_img)
# Try masks of different sizes
for n in range(1, 4):
# 使用拉普拉斯算子
kernel_size = 1+(n*2)
gray_lap = cv2.Laplacian(gray_img, cv2.CV_16S, ksizekernel_size)
# Convert image format to uint8
abs_lap = cv2.convertScaleAbs(gray_lap)
# display image
cv2.imshow(f"{1+n*2}_lap_img",abs_lap)
cv2.waitKey(0)
cv2.destroyAllWindows()
# save image
cv2.imwrite(f"./result/Laplacian/Laplacian_{1+n*2}.png",abs_lap)
if __name__ == "__main__":
main()

结果
Sobal 算子
原则
下图是 Sobal 算子使用的掩码。左边是水平方向的边缘检测,右边是垂直方向的边缘检测。
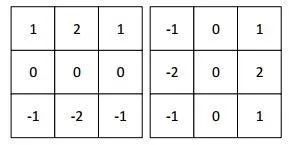
然后使用这个掩码对图像进行卷积得到边缘图像。
实施
就像拉普拉斯算子一样,openCV 也提供了书面的 Sobal 函数。
dst = cv2.Sobel(src, ddepth, dx, dy, ksize)
src :要处理的图像。
dst :输出图像。
ddepth :图像的深度。有许多标志可以使用。最常用的是cv2.CV_8U和cv2.CV_16S。
dx, dy :选择要在水平或垂直方向进行的操作,选择1, 0/0, 1。
ksize :掩码的大小。
在Sobal操作之后,convertScaleAbs通常会执行一个操作,将图像转换回可以正常显示的格式。
dst = cv2.convertScaleAbs(src)
示例程序
import cv2
def main():
# read image
gray_img = cv2.imread("./lenna.jpg", 0)
cv2.imshow("img",gray_img)
# Try masks of different sizes
for n in range(1, 4):
# 使用 sobel 算子
kernel_size = 1+(n*2)
x = cv2.Sobel(gray_img, cv2.CV_16S, 1, 0, ksize=kernel_size)
y = cv2.Sobel(gray_img, cv2.CV_16S, 0, 1, ksize=kernel_size)
# Convert image format to uint8
absX = cv2.convertScaleAbs(x)
absY = cv2.convertScaleAbs(y)
# Add the results from both directions to form a complete contour
dst = cv2.addWeighted(absX, 0.5, absY,0.5,0)
# display image
cv2.imshow(f"{1+n*2}_x",absX)
cv2.imshow(f"{1+n*2}_y",absY)
cv2.imshow(f"{1+n*2}_x+y",dst)
cv2.waitKey(0)
cv2.destroyAllWindows()
# save image
cv2.imwrite(f"./result/Sobal/Sobal_{1+n*2}_x.png",absX)
cv2.imwrite(f"./result/Sobal/Sobal_{1+n*2}_y.png",absY)
cv2.imwrite(f"./result/Sobal/Sobal_{1+n*2}_x+y.png",dst)
if __name__ == "__main__":
main()

输入

结果(内核大小 = 3)

结果(内核大小 = 5)

结果(内核大小 = 7)
参考

原文标题 : 数字图像处理:边缘检测

 分享
分享








最新活动更多
-
3月27日立即报名>> 【工程师系列】汽车电子技术在线大会
-
4月1日立即下载>> 【村田汽车】汽车E/E架构革新中,新智能座舱挑战的解决方案
-
即日-4.22立即报名>> 【在线会议】汽车腐蚀及防护的多物理场仿真
-
4月23日立即报名>> 【在线会议】研华嵌入式核心优势,以Edge AI驱动机器视觉升级
-
4月25日立即报名>> 【线下论坛】新唐科技2025新品发布会
-
5月15日立即下载>> 【白皮书】精确和高效地表征3000V/20A功率器件应用指南







发表评论
请输入评论内容...
请输入评论/评论长度6~500个字
暂无评论
暂无评论