









当前位置:
OFweek 人工智能网
> 正文
LaserNet:一种高效的自动驾驶概率三维目标探测器
2019-05-16 10:09
智车科技IV
关注
本文介绍了一种基于激光雷达数据的激光网络自动驾驶三维目标检测方法——LaserNet。高效的处理结果来自于在传感器的自然距离视图中处理激光雷达数据。在激光雷达视场范围内的操作有许多挑战,不仅包括遮挡和尺度变化,还有基于传感器如何捕获数据来提供全流程信息。
本文介绍的方法是使用一个全卷积网络来预测每个点在三维物体上的多模态分布,然后有效地融合这些多模态分布来生成对每个对象的预测。实验表明,把每个检测建模看作一个分布,能获得更好的整体检测性能。基准测试结果表明,相比其他的检测方法,本方法的运行时间更少;在训练大量数据来克服视场范围目标检测问题上,本方法获得最佳性能。
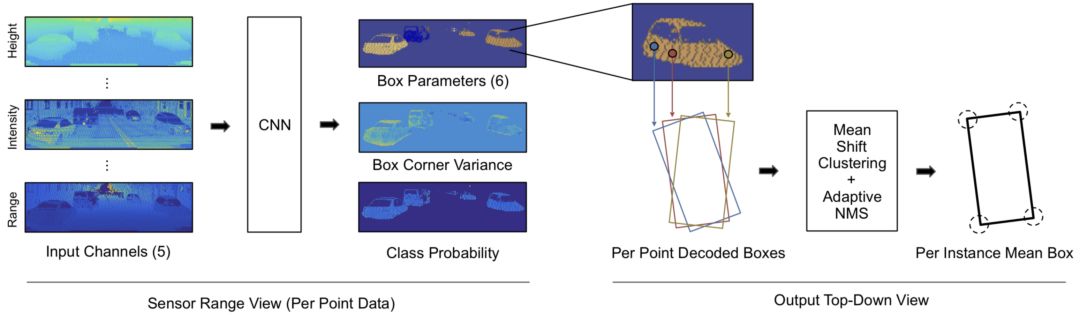
LaserNet通过以下几个步骤实现三维检测:
使用传感器的固有范围视场来构建一个密集的输入图像;
图像通过全卷积网络生成一组预测;
对于图像中的每个激光雷达点,预测一个类概率,并在俯视图中对边界框架进行概率分布回归;
每个激光雷达点分布通过均值漂移聚类进行组合,以降低单个预测中的噪声;
检测器进行端到端训练,在边界框架上定义损失;
用一种新的自适应非最大抑制(NMS)算法来消除重叠的边框分布。

上图为深层聚合网络架构。列表示不同的分辨率级别,行表示聚合阶段。

上图为特征提取模块(左)和特征聚合模块(右)。虚线表示对特征图进行了卷积。

 分享
分享
声明:
本文由入驻维科号的作者撰写,观点仅代表作者本人,不代表OFweek立场。如有侵权或其他问题,请联系举报。








最新活动更多
-
7.30-8.1火热报名中>> 全数会2025(第六届)机器人及智能工厂展
-
7月31日免费预约>> OFweek 2025 具身机器人动力电池技术应用大会
-
免费参会立即报名>> 7月30日- 8月1日 2025全数会工业芯片与传感仪表展
-
即日-2025.8.1立即下载>> 《2024智能制造产业高端化、智能化、绿色化发展蓝皮书》
-
8月5日立即报名>> 【在线会议】CAE优化设计:医疗器械设计的应用案例与方案解析
-
8月14日立即报名>> 【在线研讨会】解析安森美(onsemi)高精度与超低功耗CGM系统解决方案







发表评论
登录
手机
验证码
手机/邮箱/用户名
密码
立即登录即可访问所有OFweek服务
还不是会员?免费注册
忘记密码其他方式
请输入评论内容...
请输入评论/评论长度6~500个字
暂无评论
暂无评论